






随着计算机视觉技术的飞速发展,实时目标追踪已成为人工智能领域的研究热点,霍夫变换作为一种强大的图像识别技术,广泛应用于目标追踪领域,本文将介绍霍夫变换的基本原理,探讨其在实时追踪中的应用,以及未来的发展前景。
霍夫变换的基本原理
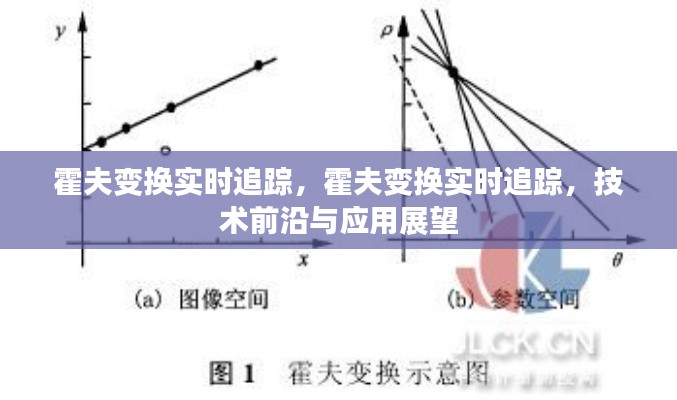
霍夫变换是一种用于图像识别和计算机视觉的技术,它通过检测图像中的形状、线条和特征来识别目标,其基本思想是将图像空间中的像素点转换为参数空间中的曲线或曲面,从而实现对目标形状的识别,在目标追踪领域,霍夫变换可用于检测运动目标的位置、速度和方向等关键信息。
霍夫变换在实时追踪中的应用
实时追踪是计算机视觉领域的一个重要分支,广泛应用于自动驾驶、智能监控、人机交互等领域,霍夫变换在实时追踪中的应用主要体现在以下几个方面:
1、目标检测与识别:通过霍夫变换,可以实时检测视频流中的运动目标,如车辆、行人等,并对其进行准确识别,这对于自动驾驶和智能监控等应用具有重要意义。
2、运动目标跟踪:霍夫变换可以实现对运动目标的实时跟踪,通过识别目标的特征点,如边缘、角点等,实现对目标的稳定跟踪。
3、目标轨迹预测:基于霍夫变换的目标识别与跟踪,可以实现对目标运动轨迹的预测,为自动驾驶的决策系统提供关键信息。
霍夫变换实时追踪的技术流程
霍夫变换实时追踪的技术流程主要包括以下几个步骤:
1、图像预处理:对输入的视频帧进行预处理,如去噪、增强等,以提高后续处理的准确性。
2、目标检测:利用霍夫变换检测视频帧中的运动目标,并提取目标的特征信息。
3、目标跟踪:基于检测到的目标特征,实现对目标的实时跟踪。
4、轨迹预测:根据目标的历史轨迹,预测其在未来时刻的位置和速度。
5、结果输出:将追踪结果以图像或数据形式输出,供后续处理或应用。
技术挑战与解决方案
尽管霍夫变换在实时追踪领域取得了显著成果,但仍面临一些技术挑战,如复杂环境下的目标识别、遮挡问题、实时性要求高等,针对这些挑战,可以采取以下解决方案:
1、改进霍夫变换算法,提高识别准确率;
2、结合深度学习等技术,提高遮挡环境下的目标识别能力;
3、优化算法性能,提高实时处理能力;
4、引入多传感器融合技术,提高系统的鲁棒性。
案例分析
目前,霍夫变换实时追踪已在实际应用中取得显著成效,在自动驾驶领域,通过霍夫变换实现车辆和行人的实时检测与跟踪,为自动驾驶系统提供关键信息,提高行驶安全性,在智能监控领域,霍夫变换可用于实现目标的自动检测和跟踪,提高监控效率。
未来展望
随着人工智能技术的不断发展,霍夫变换实时追踪在未来将迎来更广阔的发展空间,该技术将更加注重实时性、准确性和鲁棒性的提高,同时与其他技术如深度学习、传感器融合等相结合,为计算机视觉领域的发展带来更多可能性。
霍夫变换实时追踪作为计算机视觉领域的重要技术,具有广泛的应用前景,通过深入了解其基本原理、应用现状和技术挑战,我们可以更好地把握其发展方向,为未来的研究与应用提供有益的参考。
转载请注明来自武汉贝贝鲜花礼品网,本文标题:《霍夫变换实时追踪技术前沿,应用展望与实时追踪技术探索》





 蜀ICP备2022005971号-1
蜀ICP备2022005971号-1
还没有评论,来说两句吧...